
Proyecto: Prótesis de mano superior
Descripción general del proyecto
Imágenes de relevancia
Artículos arbitrados
JCR001
Kinematics of the human hand-applied to the design of the prosthesis
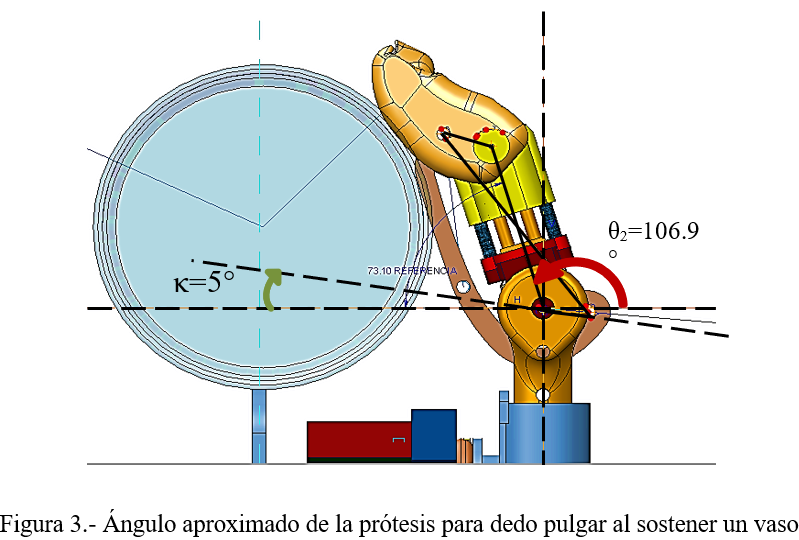
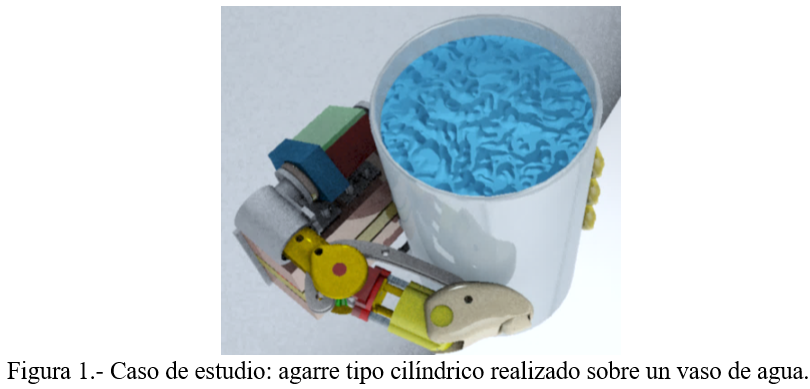
Este trabajo muestra la aplicación de un mecanismo de cuatro barras sintetizado mediante la función de síntesis, utilizado en el desarrollo de un dispositivo protésico con movimiento subactuado, para su aplicación en personas con un nivel de mutilación cercano a la dislocación distal de la muñeca. Se expone una metodología a partir de la cual se describe el procedimiento para obtener la trayectoria del mecanismo de cuatro barras mediante la síntesis de funciones, formulada a partir de dos modelos matemáticos expresados en términos de valores antropométricos y rangos de movimiento para el índice y el pulgar, respectivamente. Como resultado de la síntesis de estos mecanismos, se obtuvo un prototipo de mano protésica, el cual cuenta con siete grados de libertad independientes entre sí, lo que permite desarrollar sujeciones puntuales y cilíndricas. El propósito de este prototipo es su aplicación en estudios posteriores de patrones de agarre e interpretación de señales mioeléctricas, que permitan determinar un mecanismo de control más fácil de interpretar y que posibilite generar agarres dinámicos en lugar de agarres estáticos promedio.
JCR003
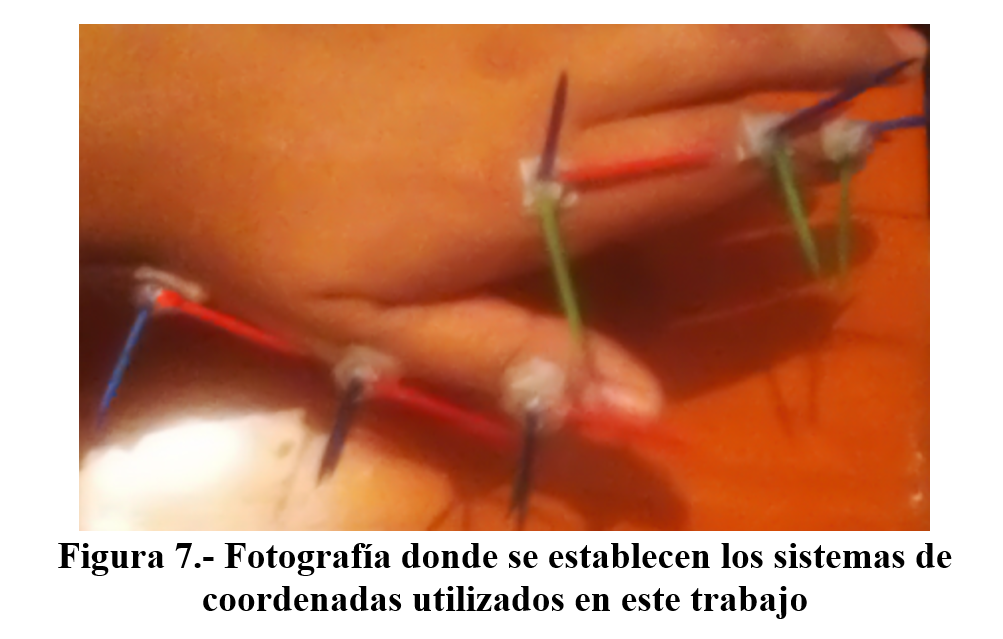
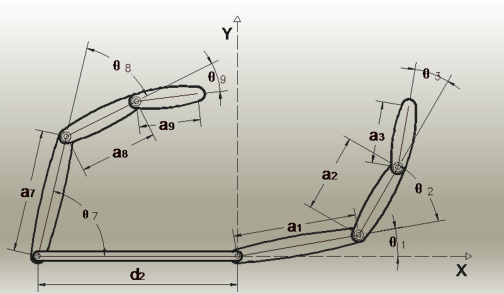
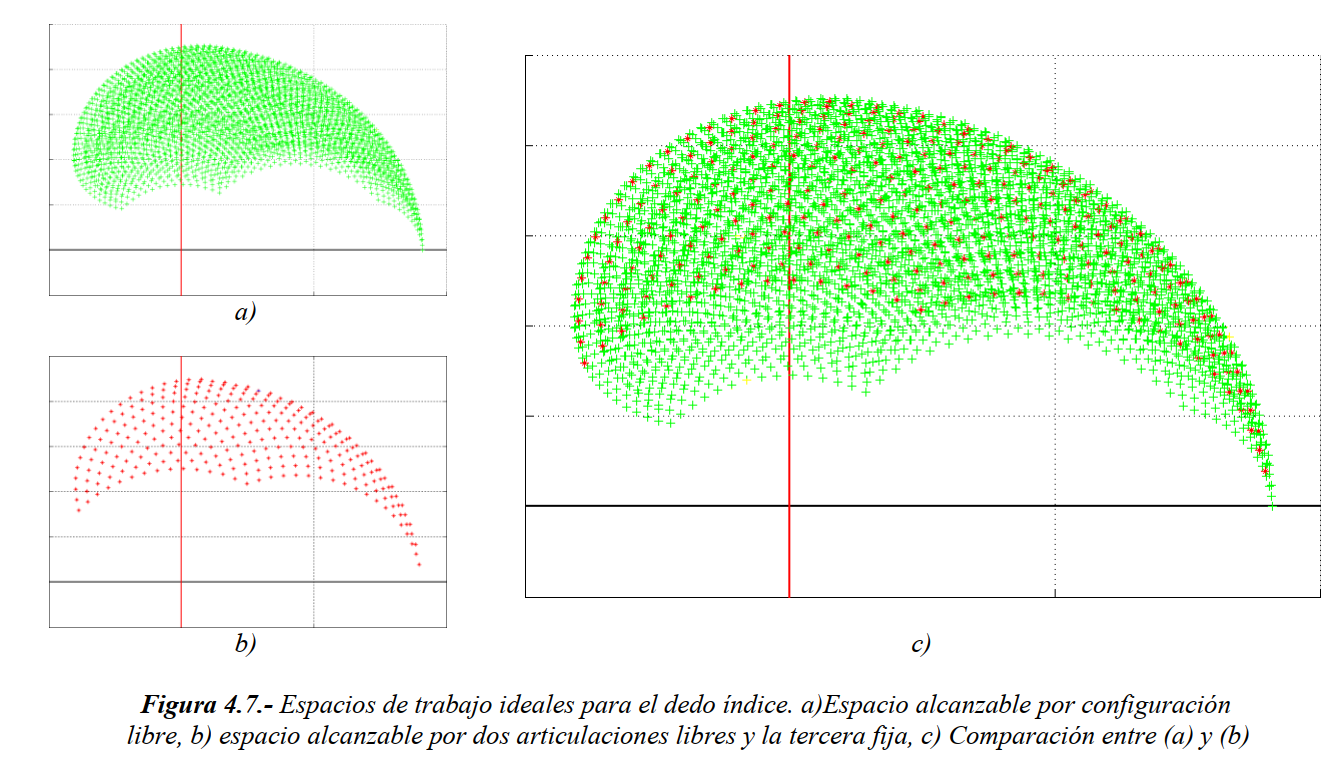
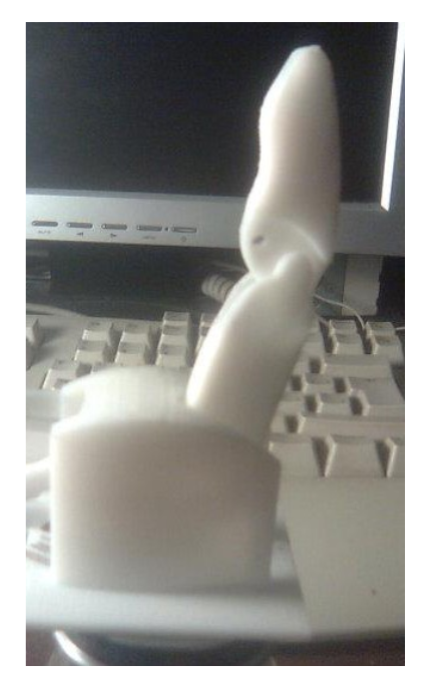
Design and Development of an Experimental Claw-Grip, Forefinger Simulator. Part I: Kinematics
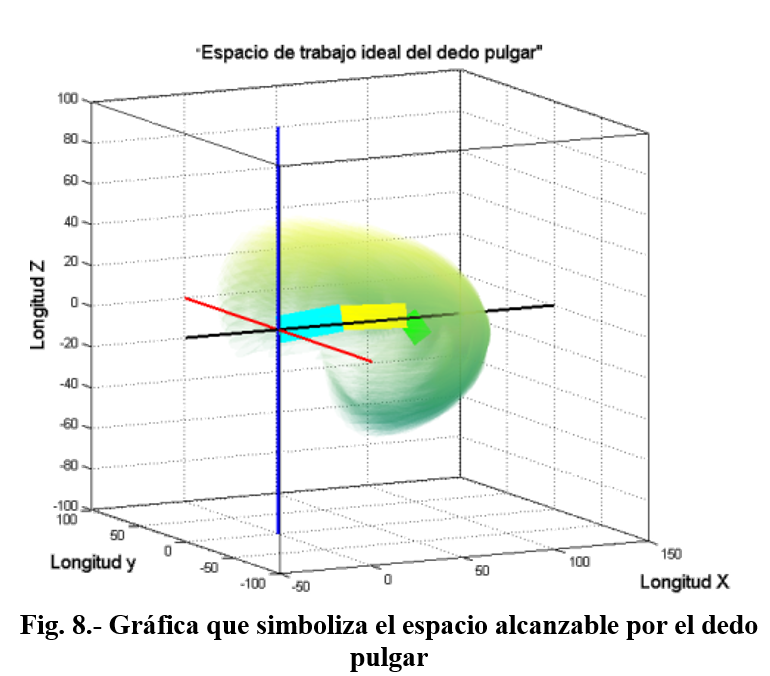
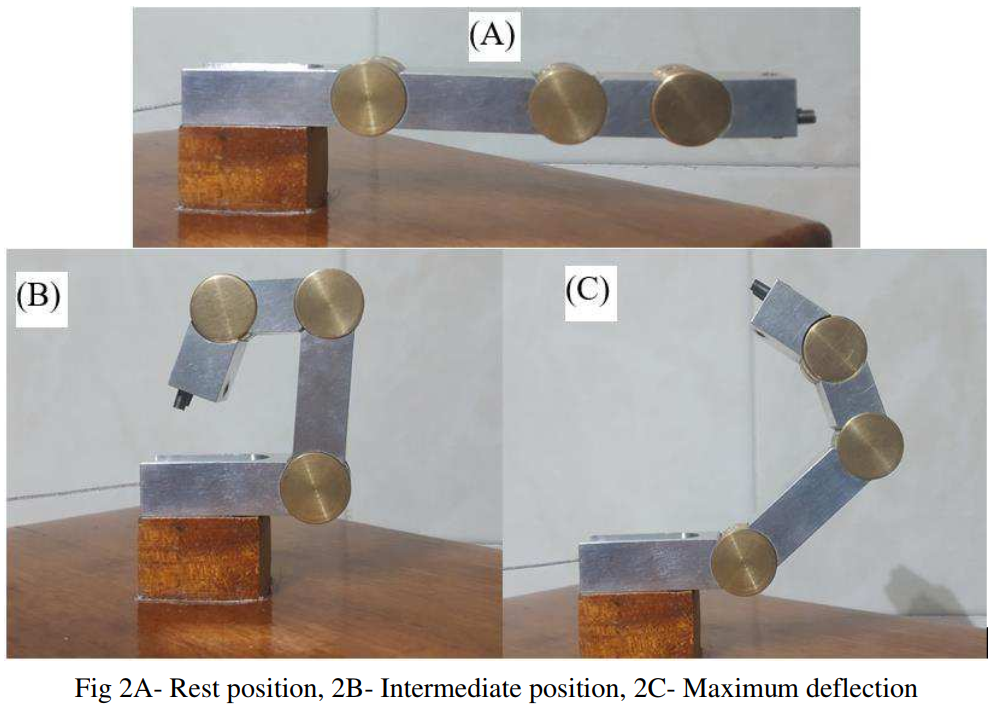
La evolución lograda en el desarrollo de manos robóticas en los últimos años ha solucionado algunos problemas. Ha permitido copiar el comportamiento estético y mecánico del miembro sano, aunque aún se encuentra limitada a aplicaciones para probar prototipos. Por otro lado, algunas desventajas son que el equipo utilizado para generar estos dispositivos es demasiado grande, pesado, ruidoso y difícil de montar en un espacio reducido, como la articulación de la mano. En este trabajo, el objetivo principal es desarrollar el movimiento de dos dedos, el pulgar y el índice, ya que estos realizan la mayoría de las funciones importantes de la mano y su movimiento es al menos tan complejo como el de los otros tres dedos. Para poder reducir el mecanismo de acción del dedo, se utilizó una cinemática simplificada, basándose en las ecuaciones de Denavit y Hartenberg, las cuales eliminan las redundancias en los parámetros de movimiento. Tras haber resuelto las ecuaciones mediante un programa desarrollado en Math Lab™, se obtuvieron las soluciones de los parámetros cinemáticos, como la posición, la velocidad y otros. Se mencionarán las herramientas utilizadas para diseñar y construir la mano, como el software CAD/CAE computacional y la impresora de modelos 3D. Finalmente, los resultados obtenidos fueron satisfactorios y se construyó el prototipo.
JCR016
Multi-objective optimization of a parallel manipulator for the design of a prosthetic arm using genetic algorithms
Este artículo presenta la síntesis de un manipulador paralelo esférico para el hombro de un brazo protésico humano con siete grados de libertad, utilizando una optimización multiobjetivo. Se consideran tres objetivos de diseño: el espacio de trabajo, la destreza y los pares de los actuadores. El manipulador paralelo se modela considerando 13 parámetros de diseño en un procedimiento de optimización. Debido a la no linealidad del problema de diseño, se implementaron algoritmos genéticos. Los resultados muestran que se logra un desempeño adecuado del manipulador utilizando la optimización propuesta.